AI技術は今や伝統芸能の世界にも進出しています。人形浄瑠璃のロボット化とAI技術の搭載について研究されている都留文科大学 早野慎吾教授に、AI人形浄瑠璃ロボットの現状と課題、そしてこの技術がもたらす未来のロボットについてお話を伺いました。

都留文科大学 文学部 教授
早野 慎吾 / Shingo Hayano
【プロフィール/略歴】
都留文科大学文学部教授。
言語学・文化表現研究を基盤に、AIロボットの感情表現設計を研究する。
人形浄瑠璃(文楽・車人形)における身体動作や語りの情動構造を主な研究対象とし、この分野の代表的論文に “Emotional Expression and Phonetic Features in Gidayu Narratives in Hidakagawa Iriaizakura”(2023, Studies in the Japanese Language Culture)、 “Investigating the Effect of Jo-Ha-Kyū on Music Tempos and Kinematics across Cultures”(2022, Leonardo)などがある。
伝統芸能研究の成果をAI・アニメーション・ロボット表現へ応用する文理融合型研究を展開し、「共感するロボット」の実現を目指した学際的研究に取り組んでいる。あわせて、社会心理学の立場からギャンブル依存症研究も行っている。
人形浄瑠璃ロボットの研究
LC Asset Design(以下LC):伝統芸能である人形浄瑠璃をAIロボットに応用する研究をされていると伺い驚きました。
早野氏:AIロボットに人形浄瑠璃の所作や感情を深層学習させる研究を行っています。人形浄瑠璃の所作や言語などを取り入れた「文化×言語×情動×身体表現」型のAIロボット研究をしているのは、本研究チームだけです。
現在3つ科研費(学術振興会による事業、学術研究の競争的資金の助成補助金)を獲得して進めています。
大阪大の石黒浩グループは表情や存在感、東京大学の國吉康夫グループは身体性認知を中心に工学主導で研究を進めていますが、本研究は、文化表現をAIで身体化することが特徴です。
研究は2016年からスタートしており、最終目標は感情を理解できるホームロボットの制作です。
人間とロボットとの間の関係性を構築する上で重要な要素は、信頼感です。人間が感情的にロボットを受け入れられるかというところがテーマとなります。
本研究成果は、科学技術振興機構(JST)が運営する国際向け情報発信サイト「Science Japan(JSTニュース)」に掲載され、日本の先端研究として海外に向けて紹介されました(2025.11.21)。
人とロボットの関係、不気味の谷とは
LC:なぜ人形浄瑠璃を選んだのですか?
早野氏:人形浄瑠璃は、いわば「不気味の谷現象」を乗り越えた、唯一の存在だからです。
不気味の谷現象とは、ロボットや人形などの人型人工物が、人間に似てくるほど、ある段階で強い不快感や不気味さを与えてしまう現象のことです。
人は、人間に近い存在を見ると、無意識のうちに「この相手は何を考えているのか」「敵意はないか」といった感情や意図を読み取ろうとします。しかし、その感情が感じ取れないと、強い違和感や恐怖を覚えてしまうのです。
人工物なのですから感情がないのは当然なのですが、外見がリアルになるほど、人はそこに人間らしさを期待してしまう。
その期待が裏切られたとき、不気味さとして表れる―これが不気味の谷の本質です。
実際、マネキン人形の顔がある時期からリアルさを避け、デフォルメされた表情へと変化していったのも、この現象と深く関係しています。
人形浄瑠璃の特色
LC:その特色とはなんですか?
早野氏:それは、人形浄瑠璃には「感情表現」が存在しているからです。
人形浄瑠璃は、江戸時代から続く日本の伝統芸能で、300年以上の歴史の中で、人の心の動きを表現する技法を磨き続けてきました。
現在では世界各地で公演され、日本語が分からない観客からもスタンディングオベーションが起こるほど、強い感情移入を生み出しています。
なぜ言葉が分からなくても心が動くのか。 その理由は、人形の動作と語りが一体となった、極めて精緻な感情表現にあります。
人形浄瑠璃の人形では、首の角度、目線、指先の動きといったわずかな変化によって、迷い、悲しみ、決意といった人間の感情が表現されます。
そこに太夫の語りと三味線が重なり、人形は単なる物体ではなく、「感情を持つ存在」として観客の前に立ち上がるのです。
私は、人とロボットの間に信頼関係を築くためには、単なる機能性ではなく、こうした共感や感情の高まりが不可欠だと考えています。
人形浄瑠璃は、まさにその理想的なモデルでした。300年以上かけて蓄積された人形浄瑠璃の感情表現は、言わば「人間の共感を生むためのビッグデータ」です。
その構造を解析し、ロボットに取り入れることで、人とロボットがより自然に理解し合える関係が築けるのではないか―そう考えたのです。
リアリティーある動作解析技術、モーションキャプチャー
LC:よりリアリティーのある動きの表現のために取り入れている技術にはどのようなものがありますか?
早野氏:代表的なものとして、モーションキャプチャという技術があります。
これは、モデルとなる人間の身体にセンサーを装着し、その動きをデータとして記録し、コンピューターグラフィックスやアニメーションに反映させる技術です。
現在のアニメーションや映画、ゲームの多くは、このモーションキャプチャによって制作されています。
この技術の最大の特徴は、人間の自然な動きを、そのまま高精度で再現できる点にあります。
動きが「人間らしくなる」というより、ほぼ「人間そのものの動き」になると言ってもよいでしょう。
しかし実は、人形浄瑠璃の文楽人形は、このモーションキャプチャにはそのままでは適していません。
文楽人形は、内部が空洞で、糸や操作者の手によって非常に自由に動く構造を持っています。
腕や首は人間の骨格構造とは異なり、伸びたり、角度が大きく変化したりします。
そのため、通常のモーションキャプチャのアルゴリズムでは、同じ人形であっても、動作ごとに「別の身体」と誤認識されてしまうことがあります。
つまり、文楽人形の動きは、人間の身体モデルを前提としたモーションキャプチャの枠組みでは、うまく統一的に解析できないのです。アニメーションのように、単純に人間の動きを置き換える、という方法では対応できません。
しかし、ここにこそ文楽の本質があります。
文楽人形の動きは、人間の骨格を単に模倣しているのではなく、感情を伝えるために最適化された動きなのです。
関節の構造も、動きの誇張も、すべてが「感情を見せる」ために設計されています。そのため私たちは、文楽人形の動作を単に再現するのではなく、文楽人形の動きが、どのように感情を伝えているのか、という構造そのものを解析し、AIに学習させる必要があるのです。
人間国宝の動作をモーションキャプチャーで
LC:なるほど。人形浄瑠璃のよりリアリティーのある動きの表現にはモーションキャプチャーの技術が必須なのですね。具体的にはどのような方の動きを参考にされているのですか?
早野氏:最初にモーションキャプチャーのデータ収録にご協力いただいたのは、文楽の人形遣いで、後に人間国宝(重要無形文化財保持者)となられた桐竹勘十郎さんです。
2016年度から、名人の動作を計測・解析する研究を本格的に開始しました。
その後、この知見を発展させ、国の重要無形民俗文化財に指定されている八王子車人形の保存団体である西川古柳座の皆さまにもご協力いただき、継続的にデータ収集と解析を行っています。
私たちが目指しているのは、名人の動きを単に写し取ることではありません。
名人の動作が、どの瞬間に、どのような感情として観客に伝わるのか― 首の角度、視線の運び、手の止め方、動きの間。 そうした細部が、観る人の心にどのような印象を生むのかを構造として整理し、AIに学習させています。
そして、その対応関係をもとに、ロボットに動作プログラムとして実装することで、喜怒哀楽といった感情表現を可能にしていくのです。
LC:なるほど。AIがロボットの動きを人間国宝の動きに変えてくれるわけですね?
早野氏:ただし重要なのは、AIが名人の動きそのものをコピーするのではなく、名人の表現が成立する要点を学習して再構成するという点です。
ディープラーニングなどのAI技術を用いることで、動きのごく僅かな差異―止めの深さ、速度の変化、重心の移動といった個性の違いまでも認識し、学習することができます。つまり、AIは動作の中にある「個性」や「表現の癖」そのものを取り込むことができるのです。
そうした細やかな心理表現にまで踏み込むことで、ロボットの動きは単なる機械的動作ではなく、見る人の感情に自然に働きかける、豊かな表現へと変わっていきます。
結果として、観る側は意識することなく、その動きに引き込まれていくのです。
ロボットの動作はソニーのロボットを参考に
LC:ロボットの動作技術はどのようにして取り入れられているのでしょうか?
早野氏:本研究チームのロボット設計と実装は、山口仁一さんが中心となって担当しています。
山口さんは、ソニーの二足歩行型ヒューマノイドロボットQRIOのプロジェクトにおいて、研究開発指導や受託研究、発明業務を専任で手掛けてこられたエンジニアです。本チームは立ち上げ当初からロボットの基盤設計を担っています。
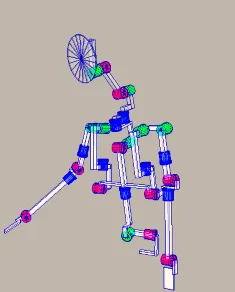
人形浄瑠璃ロボットの最大の特徴は、何と言っても関節の多さにあります。
上半身だけでも32か所に関節が配置されており(下図)、この多関節構造によって、極めて複雑で繊細な動作が可能になりました。
外見上は和服を着せているため分かりにくいのですが、内部構造としては、むしろ軟体動物に近いほど柔軟な可動性を備えています。
この柔らかさこそが、人形浄瑠璃の感情表現を支える重要な要素です。関節が細かく配置されていることで、わずかな角度や速度の違い、止めや間といった微細な動きが可能となり、それが結果として、人間の感情の揺れや機微を自然に表現することにつながります。
こうした細やかな動作の積み重ねによって、ロボットは単なる機械としてではなく、感情を宿す存在として観る人の共感を引き出すことができるのです。

※実際にモデルを3Dスキャンして、文楽人形のかしらの構造を取り入れて作成したAIロボットの頭部
AI人形浄瑠璃ロボットの課題
LC:人形浄瑠璃ロボットには技術の粋が詰まっていることが分かりました。課題はありますか。
早野氏:最大の課題は、非常に複雑な動きを実現する上半身を、安定して支える下半身の構造です。
人形浄瑠璃ロボットは、上半身に多くの関節を持つため、どうしても重心が不安定になりやすく、下半身の設計には高い技術的難度が伴います。
もう一つの大きな課題は、やはり費用面です。
モーターだけでも一体あたり数百万円規模になってしまいます。
多くのモーターを用いることで、繊細で複雑な動作が可能になりますが、その分、コストも故障リスクも大きくなります。
実際、過去には記者会見の前日に片腕が動かなくなるというトラブルも経験しました。関節が増えれば部品点数も増え、メンテナンスの難度も上がりますし、重心バランスの調整も非常に繊細になります。
特に下半身の重心制御は難しく、歩行動作の解析や実装には多くの試行錯誤を要しました。
もし巨大な研究機関のように潤沢な研究費があれば、より早く解決できた課題もあったかもしれません。
しかし、限られた研究資金の中で、少しずつ積み重ねていく必要がありました。
AI人形浄瑠璃ロボット技術をホームロボットに取り入れる
LC:人形浄瑠璃ロボットを今後どのように発展応用していきたいというビジョンはございますか?
早野氏:はい。私たちは、このAI人形浄瑠璃ロボットの技術を基盤として、将来的にはホームロボットの開発につなげたいと考えています。
ホームロボットとは、家事や介護などを担う生活支援ロボットのことですが、こうしたロボットには単なる作業能力だけでなく、人との間にある程度の感情的なつながりが不可欠だと思っています。
ロボットが人の気持ちを理解し、あるいは理解しようとする姿勢を示すことによって、初めて人はロボットを生活の中で自然に受け入れることができる。そのためには、動作・表情・言葉づかいを含めた総合的な感情表現の設計が重要になります。
そこで私たちの研究チームには、工学者だけでなく、言語学、心理学、脳科学などの専門家も参加しています。
人とロボットがどのようにすれば感情的なつながりを築けるのか、そのメカニズムそのものを学術的に解明しながら研究を進めています。
つまり、この人形浄瑠璃ロボットの研究は、単なるロボット工学の一分野にとどまるものではありません。
日本の芸能文化が持つ表現の知恵、心理学の知見、そして最先端のAI技術が交差する、文理融合の総合的研究なのです。
ロボットは、決して工学者や企業の技術者だけが作るものではありません。
多様な分野の専門家が関わり、一つの存在として形づくられていくものだと私は考えています。
本来であれば、すでにホームロボット実用化への道筋が見え始めている段階であったはずですが、研究予算の制約もあり、現状ではまだ道半ばです。
それでも、私たちは着実に目指す未来に近づいているという確かな手応えを感じています。
私は、人に寄り添い、感情的なつながりを持つことのできるロボットが、現実の社会に自然に存在する未来を思い描いています。
その原風景には、子どもの頃に触れた石ノ森章太郎の『人造人間キカイダー』のように、葛藤しながらも人の側に立とうとする存在の姿があります。
その理想を、現実の技術として形にすること―それが、私の研究の目標です。
LC:ありがとうございました。
LCマガジン(当社メディア)では以下のような記事も紹介しています。